Autonomous Vehicle Trajectory Prediction
- Tech Stack: Python, Pytorch, Pandas, Scikit-learn, Seaborn, Numpy
- Project date: March 2022 - June 2023
- Research Report URL: Full Report
Abstract
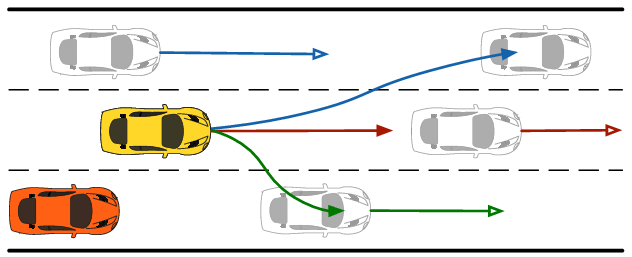
In 2010, car accidents caused more than 36K American deaths and approximately 3M injuries, and total economic loss was estimated to be $871B. Autonomous vehicles (AVs) have the potential to significantly decrease this damage by preventing accidents from occurring in the first place. In order to avoid accidents, an AV must be able to accurately predict the trajectories of other agents, such as pedestrians or other AVs, in the AV's path. Here we attempted to predict an agent, such as car, trajectory for the next six seconds givern the initial 5 seconds with Deep Learning 1-Layer Seq2Seq LSTM with attention . The data was collected in various cities to ensure the robustness of the model.
Achievement
- Led a team of 4 to propose and develop innovative agent trajectory prediction models aimed at reducing the likelihood of accidents in 6 diverse urban environments.
- Undertook extensive exploratory data analysis to investigate the relative position and velocity of each agent, and to gain insights into the patterns and trends within the data.
- Utilized advanced deep learning techniques such as Multi-Layer Perceptron (MLP), Seq2Seq LSTM (Long-Short Term Memory), and Recurrent Neural Network (RNN) to design highly accurate trajectory prediction models using PyTorch in Python.
- Significantly optimized the performance of the model by normalizing features and applying various regularization methods to reduce overfitting and to increase training efficiency by 70%.